Servo Drives Designed For The Most Demanding Motion Control Applications
Capitan Series offers CANOpen and EtherCAT communications with a bus latency down to 2 cycles. A high speed SPI bus communication is also available for optimized EtherCAT/CANopen multi-axis architectures. For applications where performance is critical, Capitan Series offers the best-in-class efficiency along with optimal performance and latency that maximizes system responsiveness.
With just 8 mm height and 18 g weight, Capitan Series offers integration capabilities that exceed expectations.
Quick Specification
| Specification | |
| Continuous Current | 10 A |
| Peak Current | 20 A (3s) |
| Efficiency | 99 % |
| Functional Safety | STO SIL3 Ple |

World Class Components
Capitan Series Features
Multiple Integration Options
Ready-to-use Capitan XCR allows quick system start-up. The pluggable module, Capitan NET and Capitan CORE, allow easy integration into carrier boards.
Safety First
Capitan has been designed to meet industrial functional safety standards to ensure continuous operation safety. STO inputs are integrated, rated to SIL-3 PLe.
Ultra-Compact Design
The Capitan footprint has been minimized to an extremely low profile, resulting in a lightweight design.
Best-in-class Servo Performance
Fast current and servo loops, with PWM frequencies up to 200 kHz delivering best-in-class performance.
Superior Power Management
Efficiency up to 99% due to state-of-the-art power stage and standby power consumption down to 1.12 W, the Capitan Series sets a new standard for servo drive power management.
Demanding Multi-Axis Applications
Capitan supports EtherCAT with a bus latency down to 2 cycles. Support for CANopen and high-speed SPI bus communication is available.
Capitan CORE
The Capitan NET series includes ultra-compact, high power density servo drives optimized for multi-axis architectures. The pluggable design is ideal for carrier boards, enabling easy integration in various applications such as end-effector actuators, surgical robot joints, exoskeletons, gimbals, and haptic applications.
Both versions feature the most advanced transistor technology, offering the highest power density and efficiency with PWM frequencies up to 200 kHz, while maintaining negligible EMI. Detailed design information and circuitry necessary for integration into the carrier PCB are provided in the product manual.
| Specification | CAP-CORE |
| Communication | SPI |
| Standby Power Consumption | 1.12 W |
| Analog Input | 2x 3.3 V Differential Analog Input 16 bits |
| Dimensions | 34.5 mm x 26 mm x 10.3 mm |

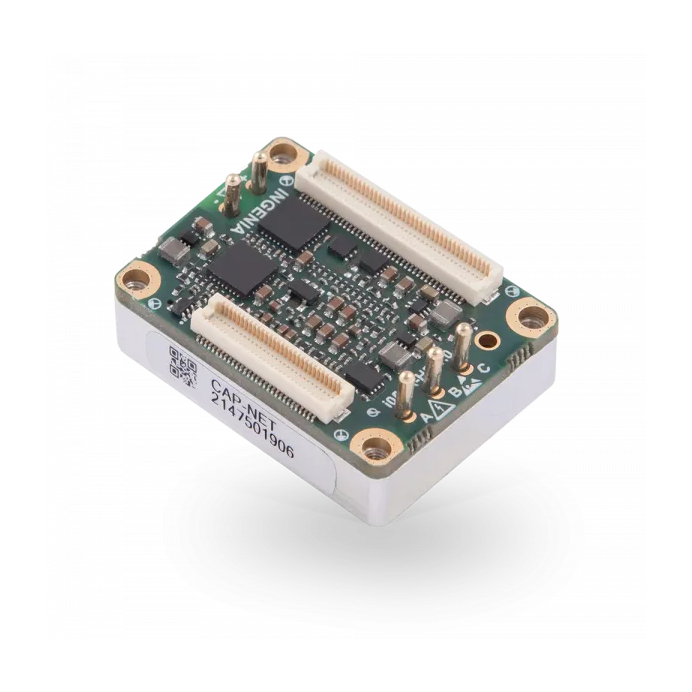
Capitan NET
The Capitan NET series includes ultra-compact, high power density servo drives optimized for multi-axis architectures. The pluggable design is ideal for carrier boards, enabling easy integration in various applications such as end-effector actuators, surgical robot joints, exoskeletons, gimbals, and haptic applications.
Both versions feature the most advanced transistor technology, offering the highest power density and efficiency with PWM frequencies up to 200 kHz, while maintaining negligible EMI. Detailed design information and circuitry necessary for integration into the carrier PCB are provided in the product manual.
| Specification | CAP-NET-E | CAP-NET-C |
| Communication | EtherCAT | CANopen |
| Standby Power Consumption | 1.28 W | |
| Analog Input | 2x 3.3 V Differential Analog Input 16 bits | |
| Dimensions | 34.5 mm x 26 mm x 10.3 mm | |

Capitan XCR
The Capitan XCR series includes ultra-compact, high power density servo drives optimized for various applications such as compact robotic joints, flat actuators, end-effector actuators, surgical robots, exoskeletons, gimbals, and haptic applications.
The drives are designed with the most advanced transistor technology, delivering the highest power density and efficiency with PWM frequencies up to 200 kHz, while maintaining negligible EMI for best-in-class performance.
| Specification | CAP-XCR-E | CAP-XCR-C |
| Communication | EtherCAT | CANopen |
| Standby Power Consumption | 1.5 W – 2.1 W | |
| Analog Input | 1x -10..10 V Differential Analog Input 16 bits | |
| Dimensions | 42 mm x 29 mm x 19.4 mm | |

